مفصل چهارشاخه یونیورسال در محیط Kinematics کتیا
مفصل چهارشاخه یونیورسال (Universal Joint) در محیط Dmu Kinematics کتیا
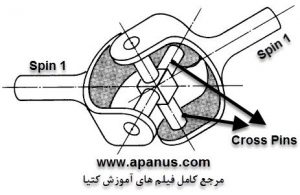
در این مطلب قصد آموزش متحرک سازی مفصل چهارشاخه یونیورسال در محیط Dmu Kinematics کتیا را داریم. مفصل چهارشاخه گاردان (Universal Joint) برای انتقال توان و گشتاور بین دو محور ناهمراستا مورد استفاده قرار می گیرد.
برای سهولت و تسریع در آموزش ، مکانیزم مورد نظر را از قبل آماده کرده ایم و شما می توانید آن را از این لینک ⇐ فایل مفصل یونیورسال دانلود و به ادامه آموزش بپردازید.
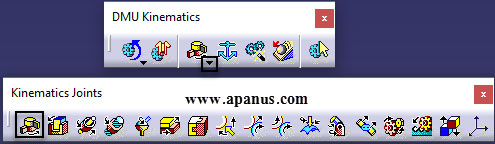
ابتدا از مسیر شکل زیر به محیط dmu kinematics بروید.

برای ایجاد مفصل یونیورسال در محیط متحرک سازی کتیا به ترتیب زیر عمل می کنیم :
مرحله اول : ایجاد مفصل ها
1 . ایجاد مفصل های اولیه چرخان استوانه چهارشاخه
همانطور که می دانید یک مفصل چهارشاخه یا یونیورسال از چند مفصل دورانی تشکیل شده است. با کلیک بر روی مثلث کوچک شکل زیر نوار ابزار مفصل های سینماتیک (Kinematics Joints) بیرون می آید و در دسترس قرار می گیرد.
الف. همانطور که در شکل نشان داده شده است بر روی مفصل Revolute کلیک کنید تا پنجره ابزار مطابق شکل زیر باز شود.

ب. بر روی مکانیزم کلیک کنید و پس از آن پنجره را تایید کنید تا یک مکانیزم در زیرشاخه Applications درخت طراحی ایجاد شود.
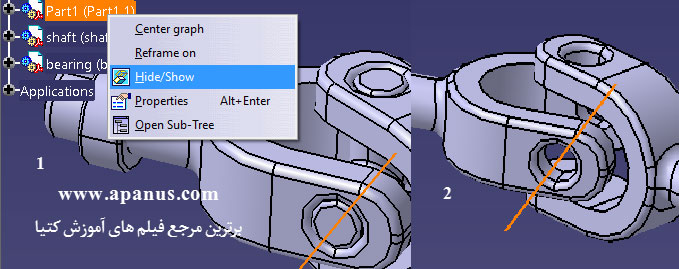
ج. حالا بر روی کادر سفید رنگ جلوی Line1 کلیک کنید و محور استوانه چهارشاخه را انتخاب کنید. پس از آن از درخت طراحی آن را مطابق شکل به ترتیب شماره زیر مخفی کنید. سپس با بردن موس روی بدنه سوراخ محور آن را به عنوان Line2 انتخاب کنید.
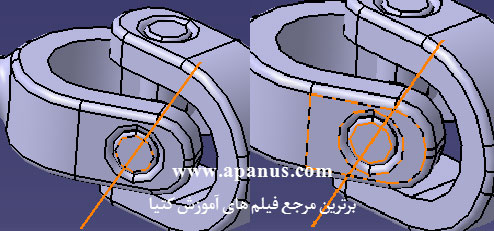
د. در این مرحله با راست کلیک بر روی قطعه چهارشاخه استوانه از نمودار درختی آن را به حالت نمایش برگردانید و سطح سر استوانه افقی را به عنوان Plane1 و سطح روی بدنه دسته را به عنوان Plane2 انتخاب کنید.
گزینه Angle Driven را هم روشن کنید تا زاویه حرکتی در نظر گرفته شود.
ذ. همه مراحل الف تا د را برای استوانه عمودی قطعه چهارشاخه و دسته سمت راست تکرار کنید.
2 . ایجاد قطعه ثابت Fix
الف. بر روی آیکن زیر از نوار ابزار DMU Kinematics کلیک کنید و مطابق شکل زیر بلبرینگ سمت راست را به عنوان قطعه ثابت انتخاب کنید.

ب. همین کار را برای بلبرینگ سمت چپ تکرار کنید.
نکته : در عمل هم اگر دقت کرده باشید ، کنس بیرونی بلبرینگ ها روی بدنه قرار می گیرند و در واقع اعضای ثابت هستند.
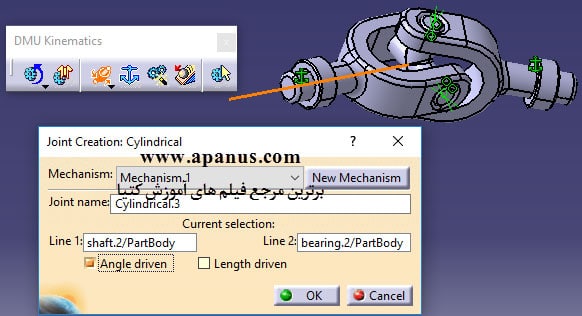
3 . ایجاد مفصل استوانه محوری Cylindrical
الف. مطابق شکل زیر بر روی آیکن مفصل استوانه محوری Cylindrical کلیک کنید و به ترتیب محور شفت 2 و بلبرینگ 2 را به عنوان Line1,2 انتخاب کنید. دقت کنید که فقط گزینه Angle driven را روشن کنید تا در جهت زاویه حرکت داشته باشید.
ب. کارهای انجام داده در مرحله الف را برای شفت 1 و بلبرینگ 1 تکرار کنید.
ج. در شکل زیر مشاهده می کنید که DOF یا درجه آزادی 2 است. علت آن عدم تعیین حرکت طولی شفت ها درون بلبرینگ ها است. با دابل کلیک بر روی Cylindrical 1 و سپس وارد کردن مقادیر 20 و 20- و کلیک بر روی Ok درجه آزادی یک عدد پایین می آید.
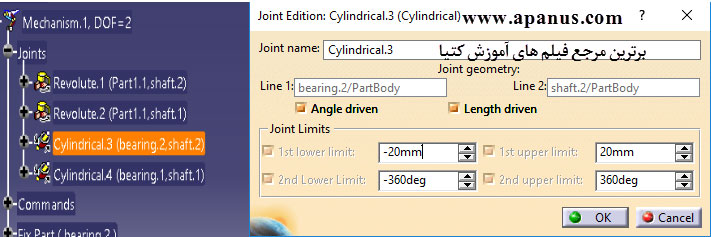
د. همان کاری را که در مرحله ج انجام دادید برای شفت 1 و بلبرینگ 1 انجام دهید. وقتی این کار را انجام دهید با پیغام زیر مبنی بر اینکه مکانیزم قابل متحرک سازی شدن است مواجه می شوید.
مرحله دوم : متحرک سازی و شبیه سازی
حال برای متحرک سازی مکانیزم چهارشاخه یونیورسال (Universal Joint) به ترتیب زیر عمل می کنیم.
1 . بر روی آیکن زیر از میله ابزار مفصل های سینماتیک (Kinematics Joints) کلیک می کنیم و سپس Mechanism 1 را انتخاب و بر روی Ok کلیک می کنیم.
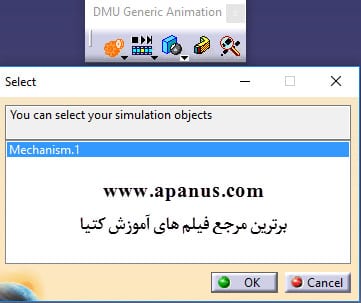
2 . پنجره ابزار مطابق شکل زیر باز می شود.
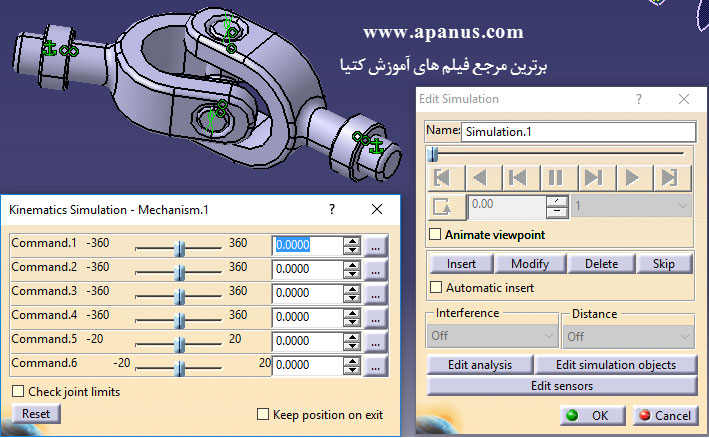
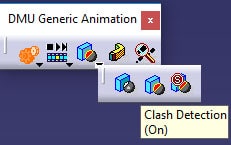
نکته : بر روی Clash detection on تا قطعات رفتار واقعی داشته باشند و از داخل همدیگر عبور نکنند و مثل یک قطعه صلب عمل کنند.
هر یک از لغزنده های Command مربوط به یکی از قیدهای حرکتی مکانیزم چهارشاخه یونیورسال (Universal Joint) هستند. با درگ کردن روی یکی از لغزنده ها مقدار زاویه را تغییر دهید.
نکته اینکه چنانچه تعداد Command ها و قیودی که برای حرکت بخش های مختلف یک مکانیزم تعریف می کنیم بیش از حد باشد، نرم افزار کتیا نمی تواند شبیه سازی حرکتی را انجام دهد و با خطا مواجه می شود که برای رفع تداخل Command ها، حتما این ویدیو آموزشی ⇐ رفع مشکل تداخل قیدها در DMU کتیا را مشاهده بفرمایید.
اگر بعد از هر بار که یک یا چند Command را تغییر می دهید یکبار دکمه Insert را فشار دهید همه آن حرکت هایی که به مکانیزم داده بودید بصورت سکانس فیلم ضبط می شوند.
مطالب پیشنهادی برای مطالعه بیشتر :
مفصل های کاربردی محیط Kinematics کتیا ⇐ مفصل دورانی Revolve Joint در کتیا
مفصل های کاربردی محیط Kinematics کتیا ⇐ مفصل استوانه ای Cylindrical Joint در کتیا
فیلم آموزش قالبسازی کتیا ⇐ آموزش طراحی قالب تزریق پلاستیک در کتیا
فیلم آموزش مهندسی معکوس کتیا ⇐ آموزش ابر نقاط در کتیا
فیلم آموزش طراحی بدنه با کتیا و رندرینگ و متحرک سازی در کی شات ⇐ آموزش طراحی بدنه و کی شات
