نحوه ایجاد مفصل استوانه ای Cylindrical Joint در محیط Kinematics کتیا
در این مطلب نحوه ایجاد مفصل استوانه ای Cylindrical Joint در محیط Kinematics کتیا آموزش داده می شود. مطابق شکل زیر یک محور را درون یک بوش در نظر بگیرید.

مکانیزم مفصل استوانه ای Cylindrical Joint دارای دو درجه آزادی است. درجه اول چرخش استوانه درون سوراخ و درجه دوم حرکت طولی استوانه درون سوراخ است.
برای ایجاد مفصل استوانه ای Cylindrical Joint در محیط Kinematics کتیا به ترتیب زیر عمل می کنیم:
1 . بر روی آیکن زیر از نوار ابزار Kinematics Joints کلیک می کنیم.

2 . پنجره ابزار مطابق شکل زیر باز می شود.
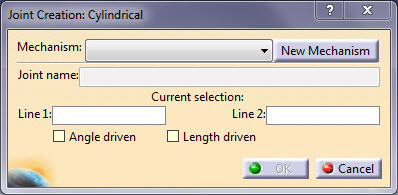
بر روی دکمه New Mechanism کلیک می کنیم تا امکان ایجاد این مکانیزم فراهم میشود.
در قسمت Line1 و Line2 به ترتیب محور استوانه و محور سوراخ را انتخاب می کنیم.
گزینههای Angle Driven و Length Driven را روشن می کنیم تا بعدا بتوانیم زاویه دوران و حرکت طولی استوانه را کنترل کنیم.
3 . بر روی دکمه Ok کلیک می کنیم.
نکته : دقت شود که قبل از متحرک سازی مکانیزم حتماً باید یک عضو ثابت نیز با استفاده از دستور Fixed Part معرفی کرده باشید.
مطالب پیشنهادی برای مطالعه بیشتر :
آموزش ایجاد مفصل کاربردی Prismatic Joint در محیط Kinematics نرم افزار Catia ⇐ مفصل کشویی Prismatic Joint در کتیا
دانلود نمونه فایل های آموزشی و تمرینی Catia به صورت pdf ⇐ آموزش کتیا pdf
فیلم کامل آموزش قالبسازی در کتیا ⇐ آموزش طراحی قالب تزریق پلاستیک در کتیا
فیلم کامل آموزش مهندسی معکوس با کتیا ⇐ آموزش ابر نقاط در کتیا
فیلم کامل آموزش طراحی بدنه در کتیا و رندرینگ با کی شات ⇐ تبدیل عکس به مدل سه بعدی در کتیا
آپانوس تولید کننده مجموعه کامل فیلم های آموزش کتیا مقدماتی ، پیشرفته ، طراحی سطوح ، ابر نقاط ، ورق کاری ، تحلیل المان محدود ، طراحی قالب ، ماشینکاری ، طراحی بدنه ، رندرینگ حرفه ای ، انیمیشن سازی حرکتی و … به صورت کاملا کاربردی ، مثال محور و خودآموز است. جهت مشاهده نمونه فیلم ها و توضیحات آن به صفحه فیلم های آموزش کتیا مراجعه و یا با مدیر سایت تماس بگیرید.
مهندس مکانیک – مجتبی محمدنیا : 09355652291
